






























































Uncanny Dimple
Robotic creatures exploring the relationship between cuteness and uncanniness.
produced by: Eevi Rutanen
Introduction
Uncanny Dimple is a body of work that examines the close proximity between the cute and the creepy. Drawing from roboticist Masahiro Mori’s concept of the Uncanny Valley, which explains the eeriness of lifelike robots, my theory of the Uncanny Dimple portrays a parallel phenomenon in the context of cuteness. The robotic creatures inhabiting the dimple demonstrate the often contradictory affects we experience towards non-human actors. When does cuteness start to border on the grotesque? If cuteness is the outcome of extreme objectification of living beings, can it also be the result of an anthropomorphising inanimate objects? Why does cuteness trigger the impulse to nurture and to protect, but also to abuse and to violate? Cute things are often seen as innocent, passive, and submissive, but can they also manipulate, misbehave and demand attention?







Concept and background research
This body of work is based on my MFA thesis Uncanny Dimple — Mapping the Cute and the Uncanny in Human-Robot Interaction, where I examine the aforementioned contradictions of cuteness by applying Donna Haraway’s Cyborg Manifesto (1991) and the Uncanny Valley theory by Masahiro Mori (1970). I also reference the recent research on the cognitive phenomenon of cute aggression, a commonly experiences impulse to harm cute objects. (Aragón et al. 2015; Stavropoulos & Alba 2018)
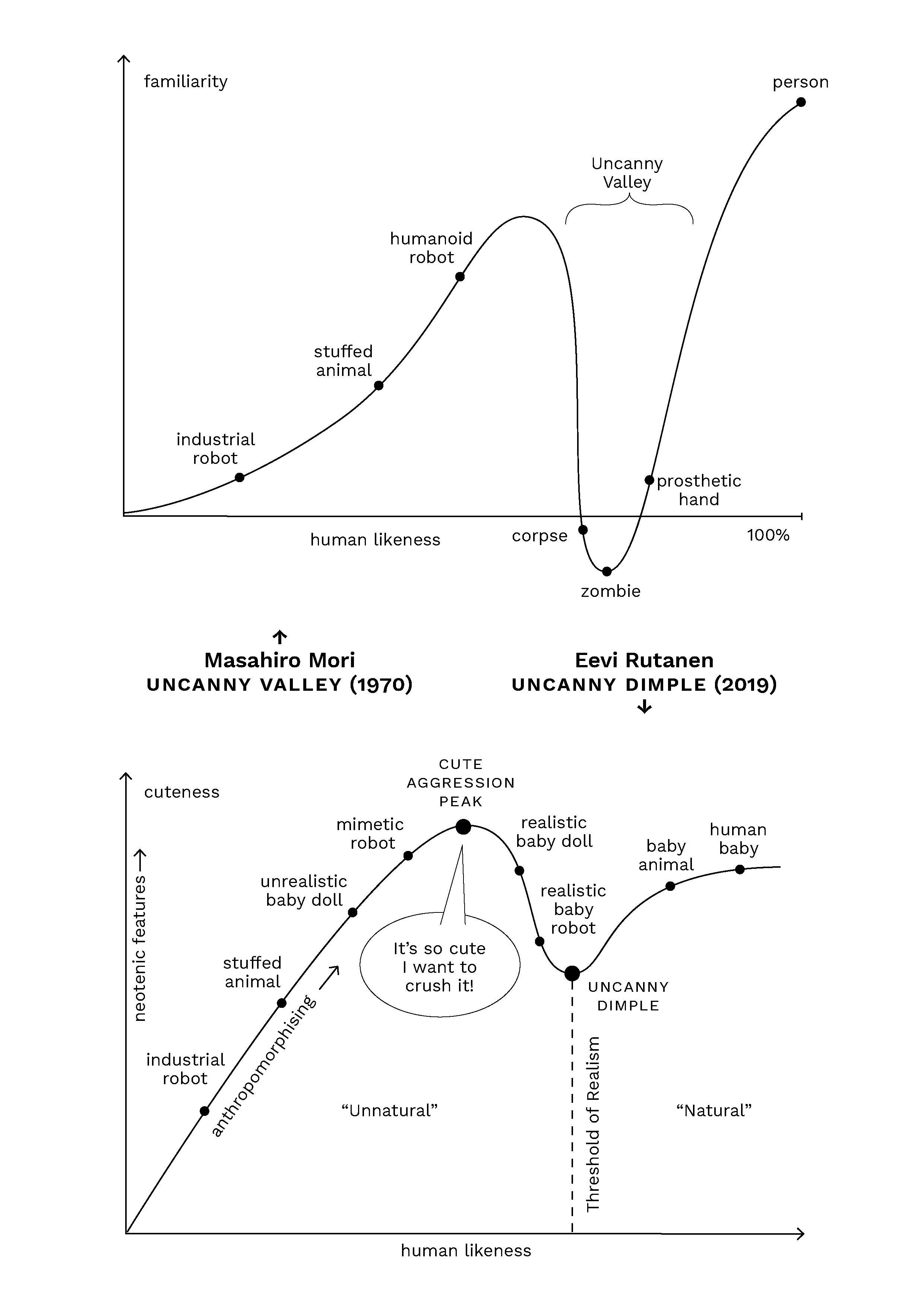
Sigmund Freud first coined the term uncanny in his 1919 essay Das Unheimliche to describe an unsettling proximity to familiarity encountered in dolls and wax figures. However, the contemporary use of the word has been inflated by the concept of the Uncanny Valley by roboticist Masahiro Mori. Mori’s notion was that lifelike but not quite living beings, such as anthropomorphic robots, trigger a strong sense of uneasiness in the viewer. When plotting experienced familiarity against human likeness, the curve dips into a steep recess — the so called Uncanny Valley — just before reaching true human resemblance.
As a rejection of rigid boundaries between “human”, “animal” and “machine”, Haraway’s cyborg theory touches many of the same points as Mori’s Uncanny Valley. Haraway addresses multiple persistent dichotomies which function as systems of domination against the “other” while mirroring the “self”, much like cuteness and uncanniness: “Chief among these troubling dualisms are self/other, mind/body, culture/nature, male/female, civilized/primitive, reality/appearance, whole/part, agent/resource, maker/made, active/passive, right/wrong, truth/illusion, total/partial, God/man.” (Haraway 1991: 59)
Haraway’s image of the cyborg, despite functioning more as a charged metaphor than an actual comment on the technology, still aptly demonstrates the dualistic nature of cuteness and its entanglements with the uncanny at the site of human-robot interaction. Furthermore, Haraway’s cyborg theory grounds the analysis of the cute to a wider socio-political context of feminist studies. In the Companion Species Manifesto where she updates her cyborg theory, Haraway (2003: 7) is adamantly reluctant to address cuteness as a potential source of emancipation (which seems to be the case with other feminists of the same generation): "None of this work is about finding sweet and nice — 'feminine' — worlds and knowledges free of the ravages and productivities of power. Rather, feminist inquiry is about understanding how things work, who is in the action, what might he possible, and how worldly actors might somehow be accountable to and love each other less violently." I argue on the contrary that some of these inquiries can be answered by exposing the potential of cuteness as a social and moral activator. While Haraway describes a false dichotomy between these “sweet and nice” worlds and “the ravages and productivities of power”, I believe that their entanglement is in fact an important site for feminist inquiry. By revealing the plump underbelly of cuteness, we can harness the subversive power it wields.
In my thesis I conclude that cuteness and uncanniness are both defined by their distance to what we consider “human” or “natural”, and shaped by the distribution of power in our relationships with objects that we deem having a mind or agency. I continue to propose that a similar phenomenon to the Uncanny Valley can be described in regard of cuteness, which I call the Uncanny Dimple. Much like Mori’s valley and Haraway’s cyborg, Uncanny Dimple is presented as a figuration: It does not necessarily try to make any empirical or quantitative claims about the experience of cuteness, but strives to utilise the diagram as a rhetorical device for better understanding the entangled affects of cuteness and uncanniness.
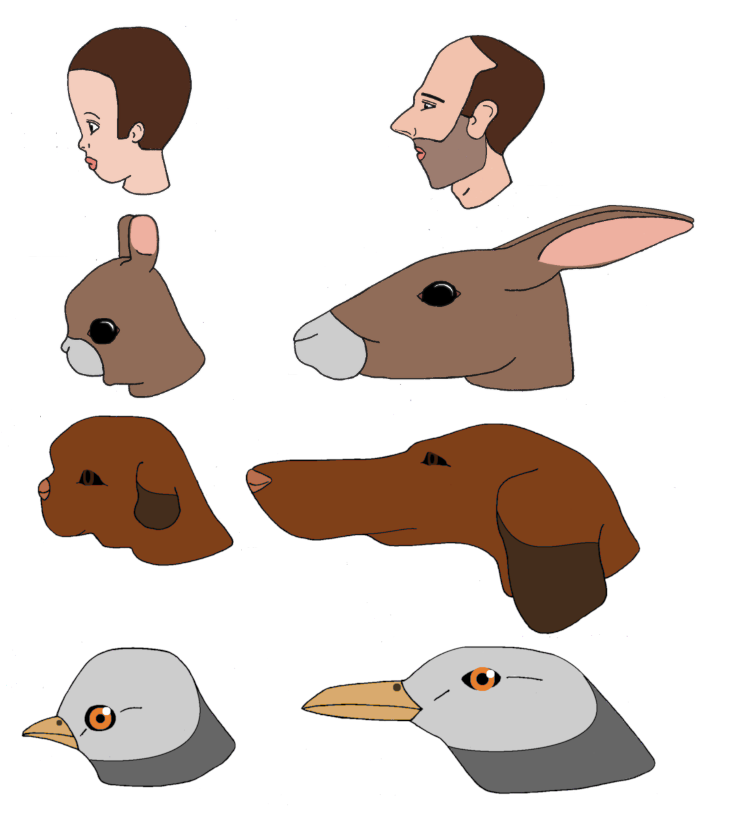
Similar to Mori’s visualisation of the Uncanny Valley, the Uncanny Dimple is mapped in a diagram where the horizontal axis denotes “human likeness”, but Mori’s vertical axis of “familiarity” is in this case replaced with cuteness. Similar to Mori, I propose that cuteness first increases proportionally with anthropomorphic features. As established in Konrad Lorenz’s Baby Schema model from 1943, cuteness also increase proportionally in the presence of neotenic (i.e. “babylike”) features, such as large eyes, tall forehead, chubby cheeks and small nose. I suggest that this applies only to some extent: When the neotenic features have reached a point where they are over-exaggerated beyond realism, but the total human likeness is still below the Threshold of Realism, cuteness climaxes at what I call the Cute Aggression Peak. When human likeness exceeds that point, cute aggression becomes unbearable, the experienced cuteness is surpassed by uncanniness, and the curve dips to the Uncanny Dimple.
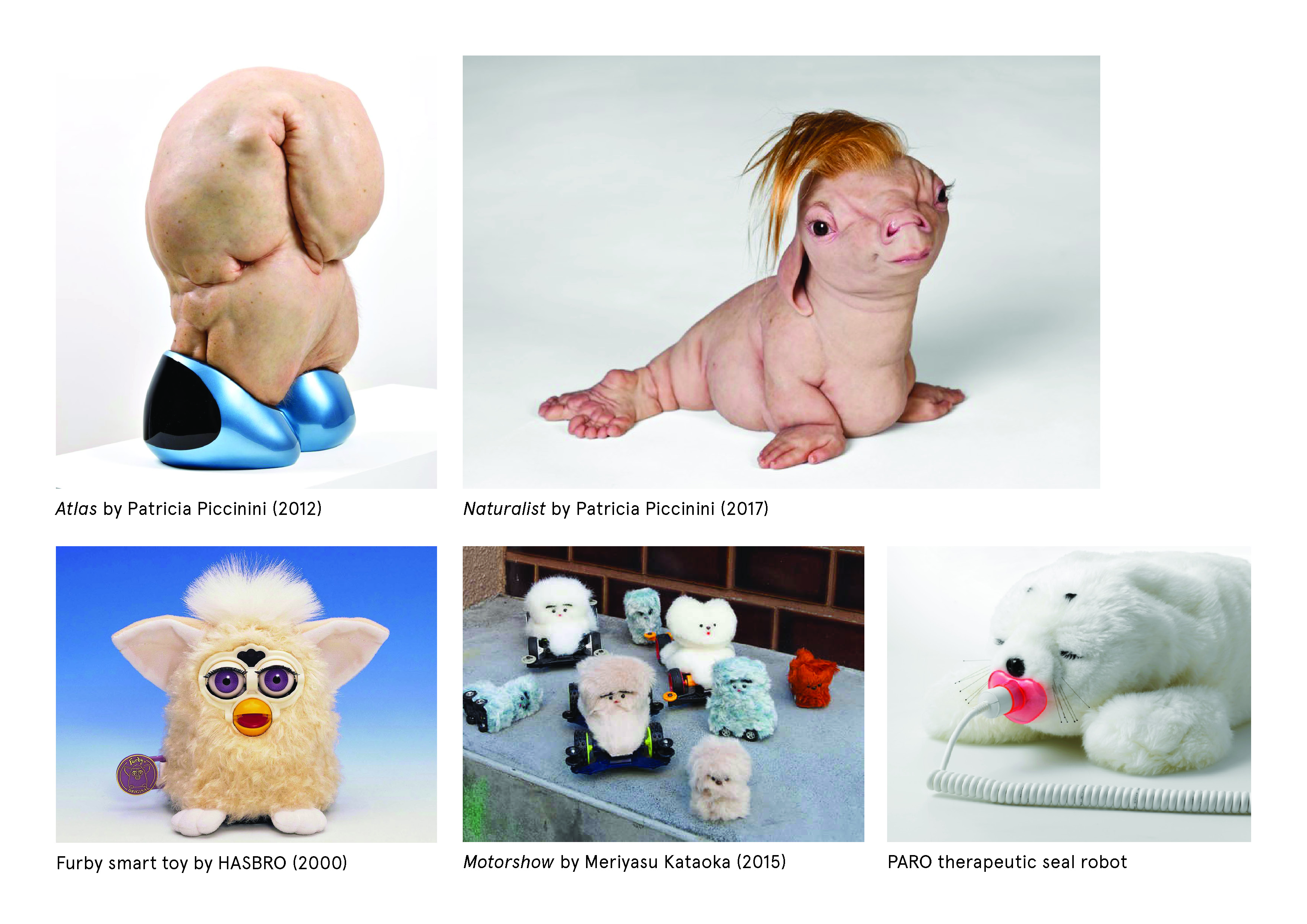
Considering the more aesthetic and technical references of my work, I was influenced by the hyperrealistic wax sculptures by Patricia Piccinini, which often depict uncanny chimeras of humans, animals and machines. I was also inspired by Meriyasu Kataoka’s playful and naivistic plush toy art, and the wide range of different commercially available smart toys and companion robots, such as Furby and PARO.
Technical
I wanted to create various cute but uncanny creatures which all had their distinctive way of moving or interacting with the audience. I created multiple different prototypes of most of the creatures, and in the final installation I had 8 different types (pictured below in the same order):
- Sebastian, a quadruped robot with obstacle detection
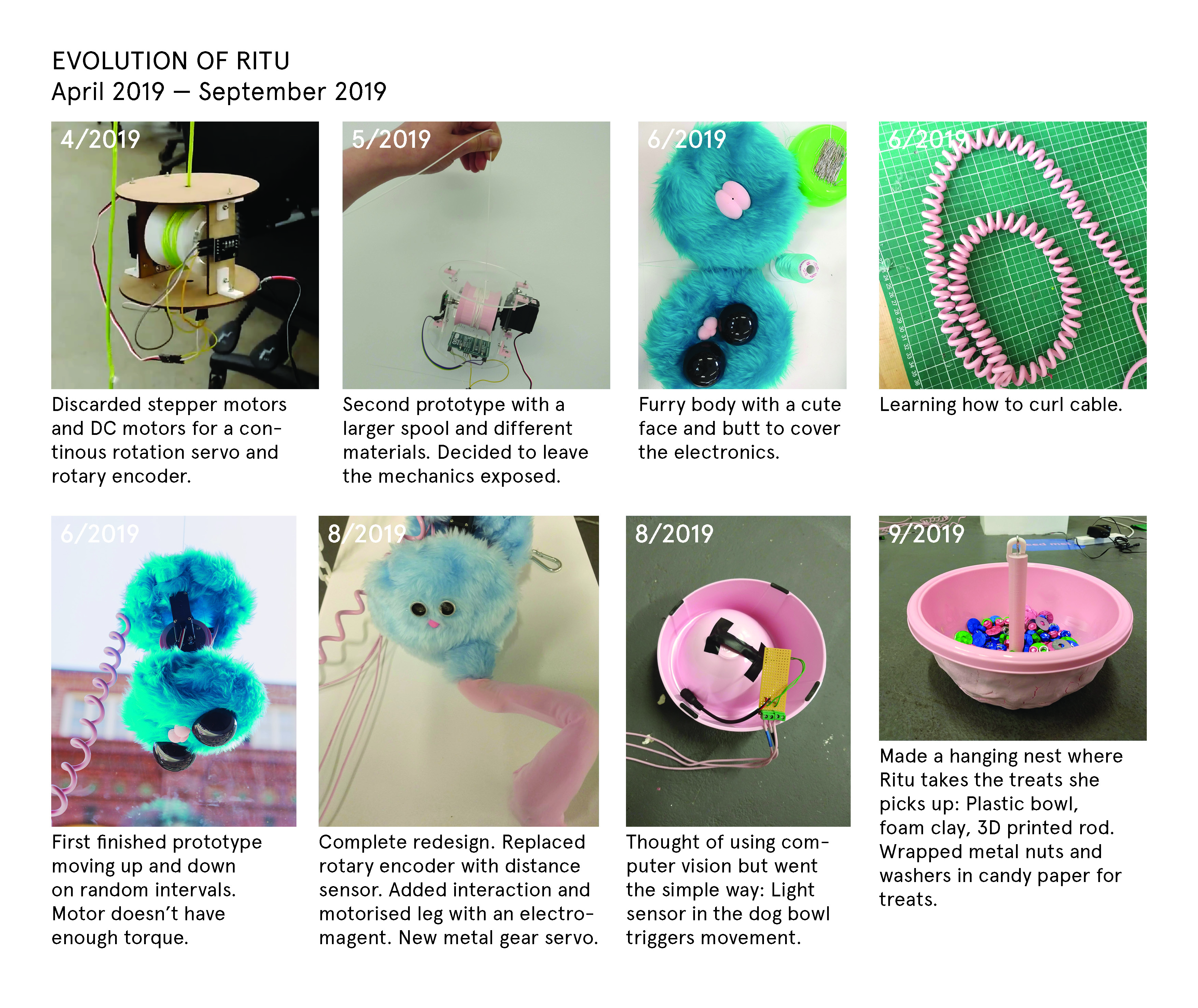
- Ritu, a vertically moving robot that can pick up objects
- Crawler Bois, two monopod crawling robots
- Lickers, three sound reactive robots with moving tongues
- Shaking Little Critter, a creature that starts vibrating if you take its hat off
- Rat Queen, a group of five autonomously moving wheeled robots
- Cute Aggression, a tactile plushie sound instrument
- Cucumber Weasel, a modified motorised toy







{kind=link}
1.
Sebastian is an interactive quadruped robot using Arduino, servo motors and an ultrasonicndistance sensor. Sebastian will wake up if it's approaced, and run away. It can also detect obstacles. The inverse kinematic functions for the quadruped gait are based on SunFounder's remote controlled robot. In the basic quadruped gait three legs are on the ground while one leg is moving. The algorithm calculates the angles for every joint in every leg at every given time, so that the centre of gravity of the robot stays inside the triangle of the three supporting legs. I designed all the parts and implemented the new dimensions in the code. I also added the ultrasonic sensor triggering and obstacle detection. For calculating distance measurements based on the ultrasonic sensor readings I used the New Ping library by Tim Eckel.
2.
Ritu is an interactive robotic installation using Arduino, various sensors, servo motors and electromagnet. Users are prompted to feed the vertically suspended robot, which will descend, pick the treat from the bowl, and take it up to its nest. There is a hidden light sensor in the bowl, which senses if food is placed in the bowl. This will trigger the robot to descend using a continous rotation servo motor winch. The distance the robot moves vertically is based on the reading of a ultrasonic sensor. The robot uses an electromagnet attached to a moving arm to pick up objects from the bowl. After succesfully grabbing the object, the robot will ascend and drop the object in a suspended nest. For calculating distance measurements based on the ultrasonic sensor readings I used the New Ping library by Tim Eckel.
3.
Crawler Bois are two monopod robots using Arduino and servo motors. They move with motorised crawling legs that mimic the mechanism of real muscles and tendons. Each robot has a leg that consist of two joints, two servo motors, a string, and two rubber bands. The first servo lifts and lowers the leg, and the second servo tightens the string (the "muscle") which contracts the joins. When the string relaxes, the rubber bands (the "tendons") pull the joints to their original position. The robots move back and forth in a randomised sequence and sometimes do a small dance.
4.
Lickers are three individually interactive robots using Arduino, servo motors, Scotch Yoke mechanisms, and sound sensors. The Scotch Yoke is a reciprocating motion mechanism, in this case converting the rotational motion of a 360 degree servo motor into the linear motion of a licking silicone tongue protruding from the mouth of a creature. If a loud sound is detected, the creature will stop licking and lift up its ears. The treshold of the sound detection can be modified directly from a potentiometer on the sound sensor module.
5.
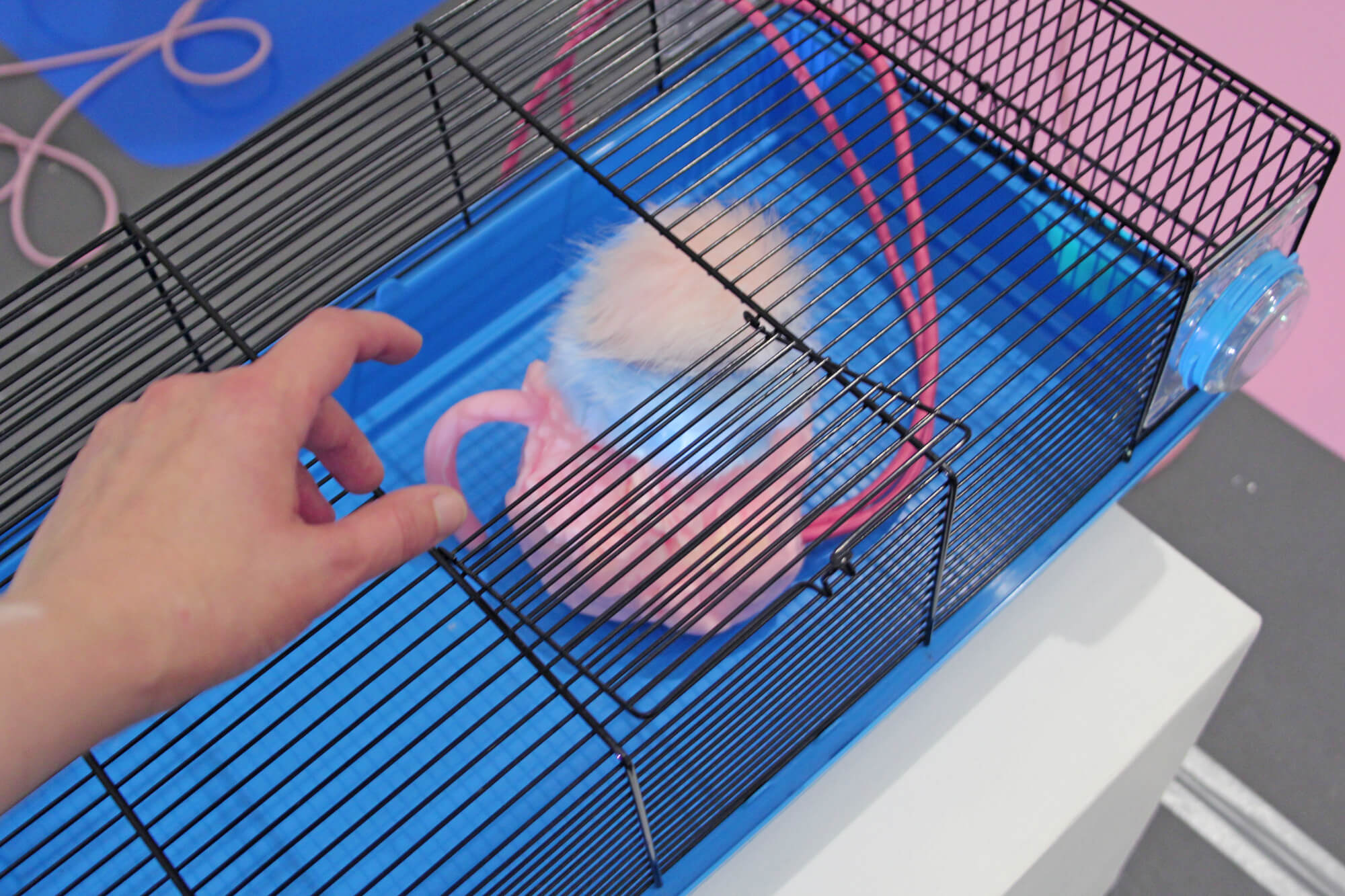
Shaking Little Critter is a simple interactive installation using an Arduino, a vibrating motor and a light sensor. Users are prompted to remove the creature's hat, after which it will "get cold" and start shaking around in its cage. The absence of the hat is detected with a light sensor on top of the creature's head.
6.
Rat Queen is a robotic installation using Arduinos and continuous rotation servo motors. It explores the emergent features arising from the combination of pseudo-randomness and mechanic inaccuracy. Rat Queen consist of five identical rat-like robots that are connected to a shared power supply with their tails. All the members of the Rat Queen move independently in randomised sequences, but because they are started at the same time, the randomness is identical, since the random seed is calculated based on the starting time of the program. However, due to small inaccuracies and differences in the continuous rotation servo motors and their installation, the movement patterns diverge, and the rats slowly get increasingly tangled with their tails.
7.
Cute Aggression is an interactive sound installation using Arduino and Max MSP. Users can record sounds by whispering in a hidden microphone in the plush toy creature's ear. A tilt switch in the ear starts the recording when the ear is lifted. The sounds are played back when the user pets the creature. The petting is detected with conductive fabric using Capacitive sensing library by Paul Badger. The reading from the sensor is sent to a Max MSP patch via serial communication. The sounds a generated from the Arduino data using a granular synthesis method based on Nobuyasu Sakonda’s SugarSynth. Sounds can be modulated by manipulating the creature's nipples, which are silicone-covered potentiometers.
8.
Cucumber Weasel is a modified version of the motorised toy know as weasel ball. The plastic ball has a weighted, rotating motor inside, which makes the ball roll and change directions. The toy usually has a furry “weasel” attached to it, but here it is replaced with a silicone cast of a cucumber.


Future development
The project grew quite organically in the span of eight months since I didn’t have a clear idea how many or what kind of robots I wanted to create when I started. I quite enjoyed working in a way that allowed me to quickly jump from one prototype to another, constantly coming up with new ideas for interesting mechanisms or interactions. However this meant that some of the creatures were not developed as far as I would have wanted, since I more or less ended up choosing quantity over quality in some cases. Especially the interactive sound plushie, which was one of the first creatures I started developing, didn’t quite evolve past the first prototype phase because I constantly got carried away with new ideas. In the future I would definitely want to develop it further, probably in the form of a sound performance as I originally intended.
On the other hand, having multiple individual robots meant that there wasn’t going to be a single point of failure that would impair the entire installation. When one robot was malfunctioning (which they obviously did) I could simply take it aside without much effect to the overall experience. Nevertheless, one major area of improvement would be to make the robots more robust, so that they could actually run for multiple days without needing any parts replaced. Most breakdowns however were mainly due to using servo motors with plastic gears, since they were less expensive and more readily available.
Also having so many different features in one project forced me to streamline the technologies to the minimum, which ended up working to my benefit: I was pleasantly surprised how very simple means — just couple of servo motors and sensors — I needed to create as varied and engaging interactions. For example, I planned using a complex computer vision system for detecting the food placed in the bowl below Ritu, but ended up developing a much more simple, elegant and failsafe solution by placing a hidden light sensor in the bowl.
From the perspective of my theoretical research, I felt that my work was able to communicate my thesis of the Uncanny Dimple to the audience. In addition, I’m satisfied how approachable the work was for everyone: It was great to see how adults, small children and dogs alike were interested in interacting with the creatures.
I also enjoyed creating work within my own aesthetic and affective category of the Uncanny Dimple, since it allowed me to take on various different diversions and new skills, such as more complex robotics and Max MSP, but it was also constrictive enough to create a unified body of work. I still have plenty of unused ideas and sketches left for robots I didn’t have time to execute, which proves that this body of work is something I definitely would want to expand in the future.
References
- Aragón, O. R; Clark, M. S.; Dyer, R. L. & Bargh, J. A. (2015). “Dimorphous Expressions of Positive Emotion: Displays of Both Care and Aggression in Response to Cute Stimuli”. Psychological Science 26(3) pp. 259–273.
- Badger, P. (2008). Capacitive sensing library.
- Eckel, T. (2017). New Ping library for ultrasonic sensor.
- Freud, S. (1919). The ‘Uncanny’. The Standard Edition of the Complete Psychological Works of Sigmund Freud, Volume XVII (1917-1919): An Infantile Neurosis and Other Works, pp. 217-256.
- Haraway, D. (1991). "A Cyborg Manifesto: Science, Technology, and Socialist-Feminism in the Late Twentieth Century," in Simians, Cyborgs and Women: The Reinvention of Nature. New York, NY: Routledge.
- Haraway, D. (2003). The Companion Species Manifesto: Dogs, People, and Significant Otherness. Chicago, IL: Prickly Paradigm Press.
- Lorenz, K. (1943). “Die angeborenen Formen moeglicher Erfahrung”. Z Tierpsychol., 5, pp. 235–409.
- Mori, M. (2012). "The Uncanny Valley". IEEE Robotics & Automation Magazine, 19(2), pp. 98–100.
- Rutanen, E. (2019). Uncanny Dimple — Mapping the Cute and the Uncanny in Human-Robot Interaction.
- Sakonda, N. (2011). SugarSynth.
- Sunfounder (n.d.). Crawling Quadruped Robot Kit v2.0.
- Stavropoulos K. M. & Alba L. A. (2018). “‘It’s so Cute I Could Crush It!’: Understanding Neural Mechanisms of Cute Aggression”. Frontiers in Behavioral Neuroscience, 12, pp. 300