






























































Message in a Bottle
By exploring the movement and sounds of plastic bottles underwater this installation highlights the volume of single use plastics in our oceans.
produced by: Kerrie O'Leary
Message in a Bottle is a visual representation of the data recorded by a weather mark North of Hawaii, where the Great Pacific Garbage Patch is located. This installation is a continuation of my ongoing research of weather patterns and ocean pollution.
Introduction
Message in a Bottle takes real data that has been collected from the National Oceanic and Atmospheric Administration data buoy North of Hawaii, where the Great Pacific Garbage Patch is located. The data recorded includes sea temperature, wind speed and wave heights. Using physical computing components, the wave heights are mapped to 13 motors that distribute the bottles the way the waves would.
Concept and background research
Forever inspired by the sea where I grew up, I am mesmerized by the movement of the water and saddened by its current condition. Not many people take time out of their day to realise the immense crisis our planet is facing regarding plastic pollution. Message in a Bottle visualises a dataset of real waves from the Great Pacific Garbage Patch. The moving sculpture hopes to start a dialogue and send a message to encourage people to think twice about consuming single use plastic items.
In a previous project I used data from a weather station from the West of Ireland to replicate a wave using small squares of navy fabric but for this piece I wanted to create an immersive experience for the viewer to reflect on the tragic reality of our oceans. Using sound and moving elements I tried to create a bittersweet atmosphere where the viewer be soothed movements of the bottles but disturbed by the noise of the plastics.
The National Oceanic and Atmospheric Administration (NOAA) have a data buoy centre that have weather stations world wide. I researched the different stations nearest the Great Pacific Garbage Patch and discovered station 46246, (50°1'2" N 145°10'12" W). The NOAA has historical data for this station going back to 2010, the data is logged every 30 minutes and includes information on the wind speed, sea temperature, wave heights and the period between waves. For this project I chose to focus only on the significant wave heights.
I was inspired by the movement created with fans in Issey Miyake’s Bloom Skin, using openFrameworks to control the fans, the cloth is given movement.

David Bowen’s work with weather station was another source of inspiration. His piece, tele-present-water, 2012, uses data from NOAA to simulation of the physical effects caused by the movement of water from halfway around the world.
Technical
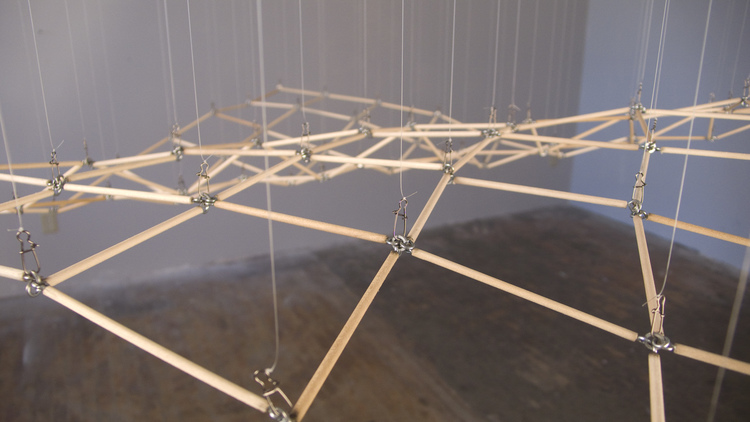
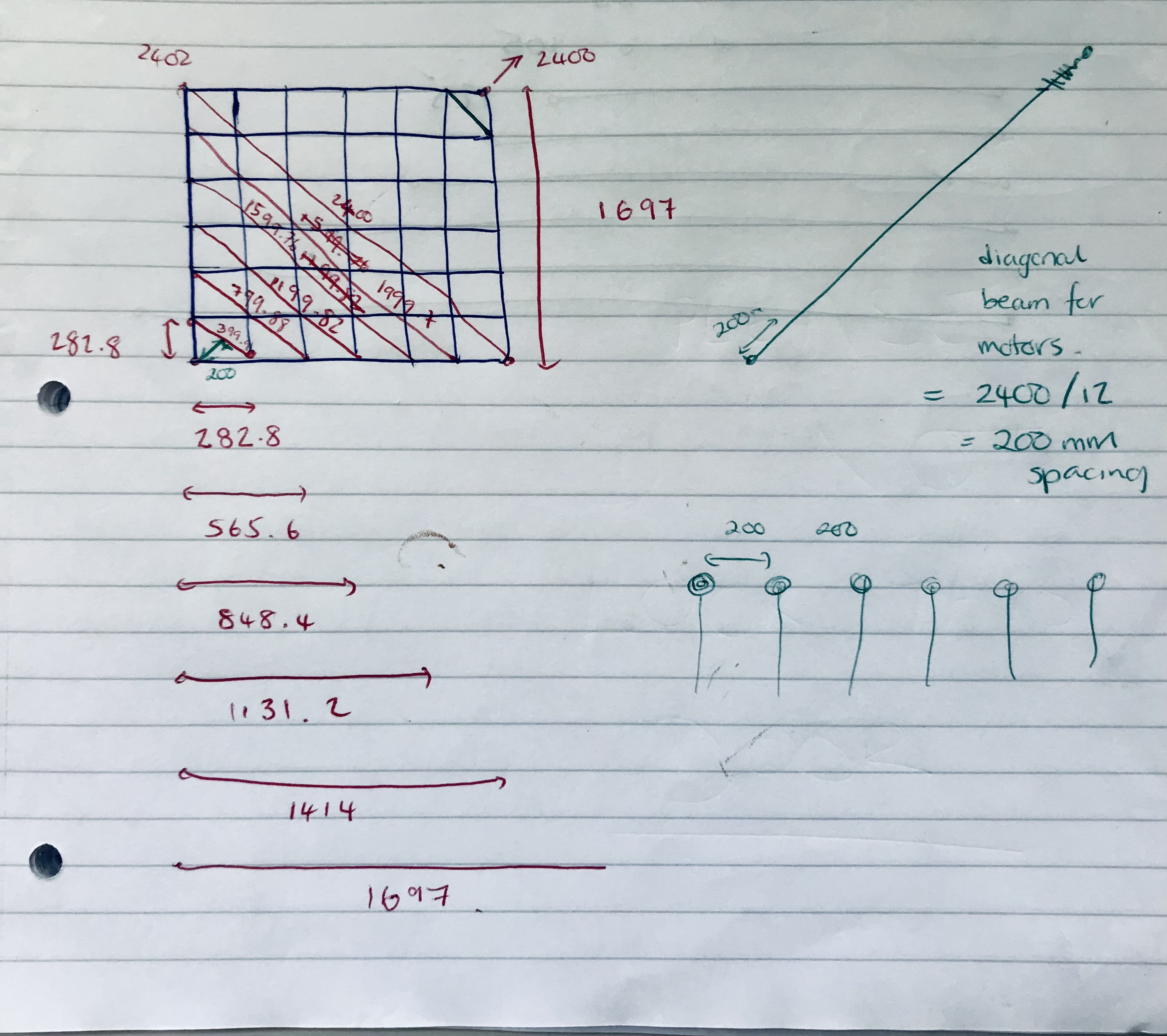
The physical setup of this installation involves a wooden square that is suspended from three horizontal wires that are connected just below ceiling height. Along a 2400cm diagonal wooden beam, 13 motors are evenly distributed. Using the 3D printer, I made 13 spools to put invisible thread and attached these to the motors. At the end of each piece of thread is a wooden rod, the rods get incremently longer as you get closer to the centre of the main beam.
The movement of the bottles is programmed using Arduino. There are 13 stepper motors controlled via a Mega Board which has 64 pins. For this project I used the 28BYJ-48 motors, which is a 5-wire unipolar stepper motor that runs on 5 volts. I had initially looked at the more sophisticated NEMA motors but when I scaled my project, the cost of these motors would have been out of my budget. The 28BYJ-28 motors have enough torque for this installation because of the lightweight nature of the bottles. I attached a ULN2003 Driver to each of the motors, these boards have four LEDs that show activity on the four control input lines that indicate the stepping state. These LEDs are can be seen in the installation above the bottles. I chose to keep these visible to give an insight to how the bottles were being moved.
I used the AccelStepper library to control the stepper motors. The library, written by Mike McCauley provides an object-oriented interface for the 4 pin stepper motors and allowing multiple simultaneous steppers move at different speeds and accelerations providing the run function is called at regular intervals. This library was extremely helpful as it meant I could vary the acceleration speed of the motors that were carrying more weight.
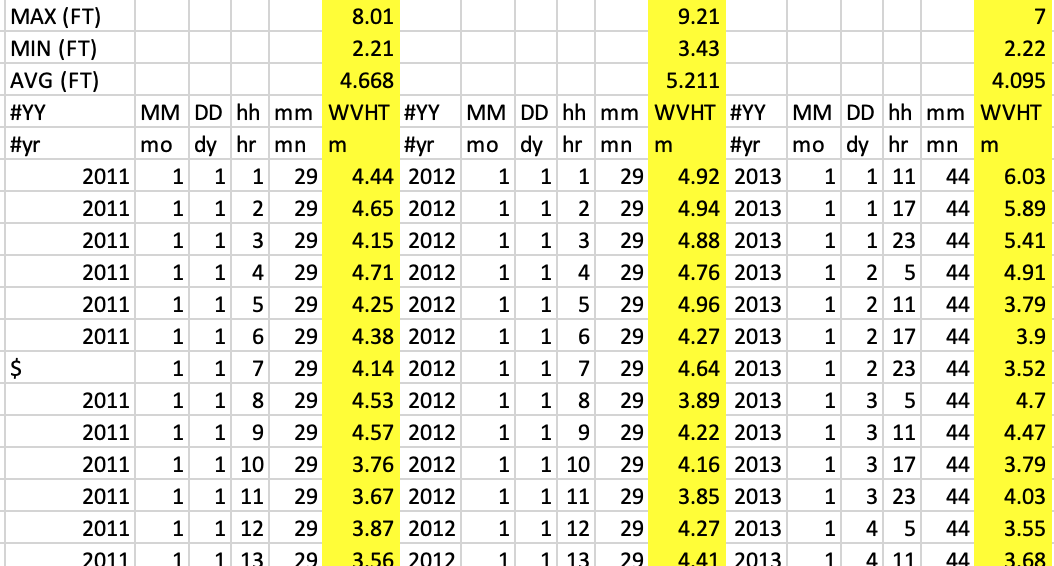
I downloaded the data recorded from weather mark and analysed the significant wave heights recorded over the past ten years. I looked at the max, min and average values recorded and used the most interesting periods. The motors then step through each mapped value that is calculated based on the lowest and highest wave recorded in the array. This constant clockwise to anticlockwise movement is what creates the hypnotic movement of the bottles.
The lighting of the installation is achieved through a Processing sketch that is constantly lerps through bright blues and dark navies. When projected on to the moving bottles, the effect is subtle but it creates an eerie, melancholic atmosphere.
The sounds played in the installation are from a recording I made at home in Dublin. I went to a local beach and found bottles floating near the shore. I used a goPro to record them interacting under the water and to capture the sound of the plastics colliding.



Future development
Exaggerating the ebb and flow of the wave heights recorded would be a natural extension of this piece. The motors I used were inexpensive, with more budget there are more precise ones available that could take more weight, and achieve more accurate positions. Some of the weather stations on the NOAA website have live webcam feeds, having these visuals projected on to the bottles could be another area to investigate and experiment. Other options would to also take the wind speed and sea temperature recorded by the weather station and incorporate them into the installation as well. This could be done with fan motors, LEDs or other actuators.
Creating an element of human interaction would be something else I would like to explore, perhaps using sensors to identify where they are stepping and use this to interact with the bottles.
Self evaluation
Prototyping was key to the success of this piece. After moving in to the church I explored working with fabrics and motors. I first began with pieces of paper and worked out how the movement would look with 5 stepper motors. I then tried with servo motors but realized that I would not be able to achieve large enough ranges of movement. It was important to test out both options however before getting too far into the development of the project and having to change direction.
Initially I had planned on projecting visuals on to the bottles. I experimented with computer vision, and the Delauney algorithm that would constantly updated depending on the brightest points on the bottles. I spent a lot of time experimenting with this but I eventually found that the visuals distracted from the movements of the bottles. I chose to instead only project a solid colour that lerped between a brighter blue and navy similar to the varying colours in the ocean. In hind sight I probably spent too much time trying to make the visuals work when instead I could have put that time to improving the movement of the bottles.
Despite making multiple prototypes I still found that when I scaled my project up to the final size it was very challenging. Hanging it from the ceiling was definitely a two-person job and certainly something I would need to consider for future installs. I’m very grateful for the help that Rob Hall gave me.
I learnt a lot during this project, mostly from working in a joint space. It was the first time we had worked together as a cohort and the feedback people gave me over the duration of our time in the church was invaluable. A few of the obstacles involved were site specific. There were pipes that could not be painted and plug sockets in awkward positions. To make the installation look polished I used foam board to cover the pipes behind the hanging structure, plug sockets and projector cables.
Lastly, it was very difficult to video and document because of the level of lighting. I played around with different cameras and lighting but caputuring the movement and the shadows was still challenging. I used a song called Huldra by Gidge which I felt added to the sad and eerie reality of what lies beneath the surface water. I believe that I achieved my goal of creating an immersive installation that triggers peoples emotions and creates awareness of the plastic pollution in our oceans.