Becoming Sentient
A series of kinetic-sculptures exploring speculative underwater beings of the future, embarking on self-awareness.
produced by: Thalia Agroti
Introduction
Becoming Sentient is an installation set up as a natural history museum of the future that displays a number of hyperventilating creatures and some of other body-parts. Similar to how modern day natural history museums currently contain specimens in tubular jars, I was largely inspired by the vast Wet Collection in the Natural History Museum in Berlin.
In my own iteration, the imaginary museum is designed to be a fuller experience by creating the atmosphere of the space in a way that would mimic the underwater environment that is natural to the beings. You are also given the option of touching some of the body parts, as well as being able to witness seemingly alive species, something which traditionally isn’t practiced in galleries or museums, with the exception of the Horniman Museum in Forest Hill.
Concept and background research
The research had initiated from personal experiences, but has ventured into theorists and practicians such as Chris Salter in Alien Agency, Donna Haraway’s perspectives and the works of Pinar Yoldas. In the background of the piece, there is concern with the environment yet in a non-apocalyptic way, meaning that the continued existence of humans is implied. At the same time, it does not pose an activist approach as it is predominantly troubled with human psychology as a crucial catalyst since the lack of addressing internal issues can be the root of problems beyond the environment.
Lets consider the technoaliens have emerged. They were not made by man and do not exist to serve us. They have evolved to be more physically resilient than us. They are comprised of jelly-like bodies, able to cope in plastic-filled oceans. While their system is adaptable to any environmental change, their emotional and social capacity is not advanced enough in order to co-habit a human planet amicably.
Most of them have significant purposes embedded into their system’s functionality such as acting as water purifiers or emitting calming sound vibrations. Yet so far, it has become apparent that they can easily swept away from their principles due to incorrect attempts for social interaction within an unfamiliar world alongside the burden of a new-found state of awareness.
This in turn, causes their functions to become inactive or passive, until they are able to re-evaluate and come to terms with how to find meaning, or a lack of meaning alongside their expected biotechnological purpose. At this point in time, they exist in an imaginary underwater subcontinent and become physically present through the work within this natural history museum of the future.
The piece wishes to bring forward feelings of empathy and understanding towards the technoalien's existential tribulations by evoking a sense of relatability to the array of their unique forms.The outmost and certainly near utopian goal, is to enhance one’s perception of existing individualities, predominantly from an emotional standpoint, whether that applies to humans or other species.
Design
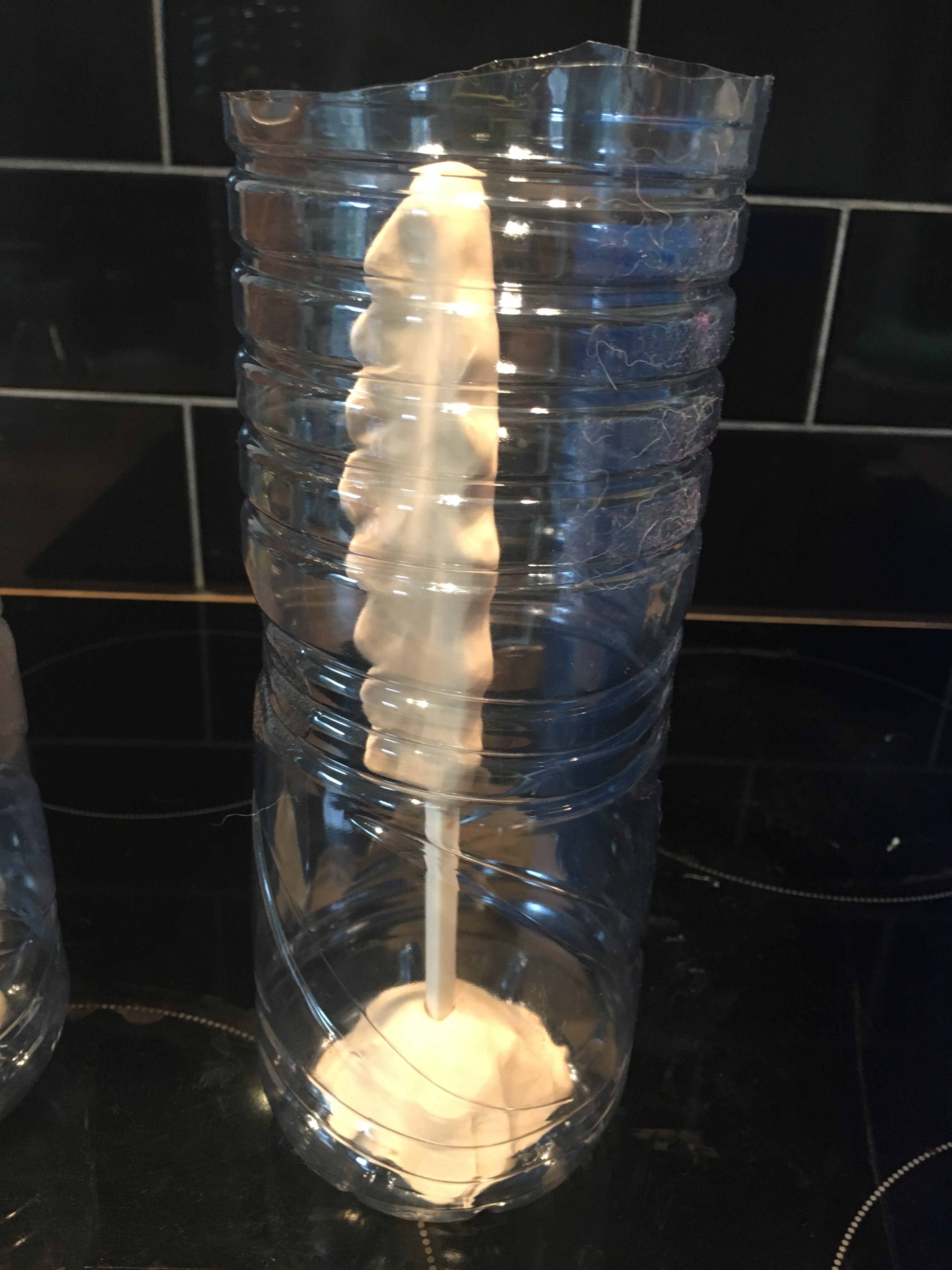
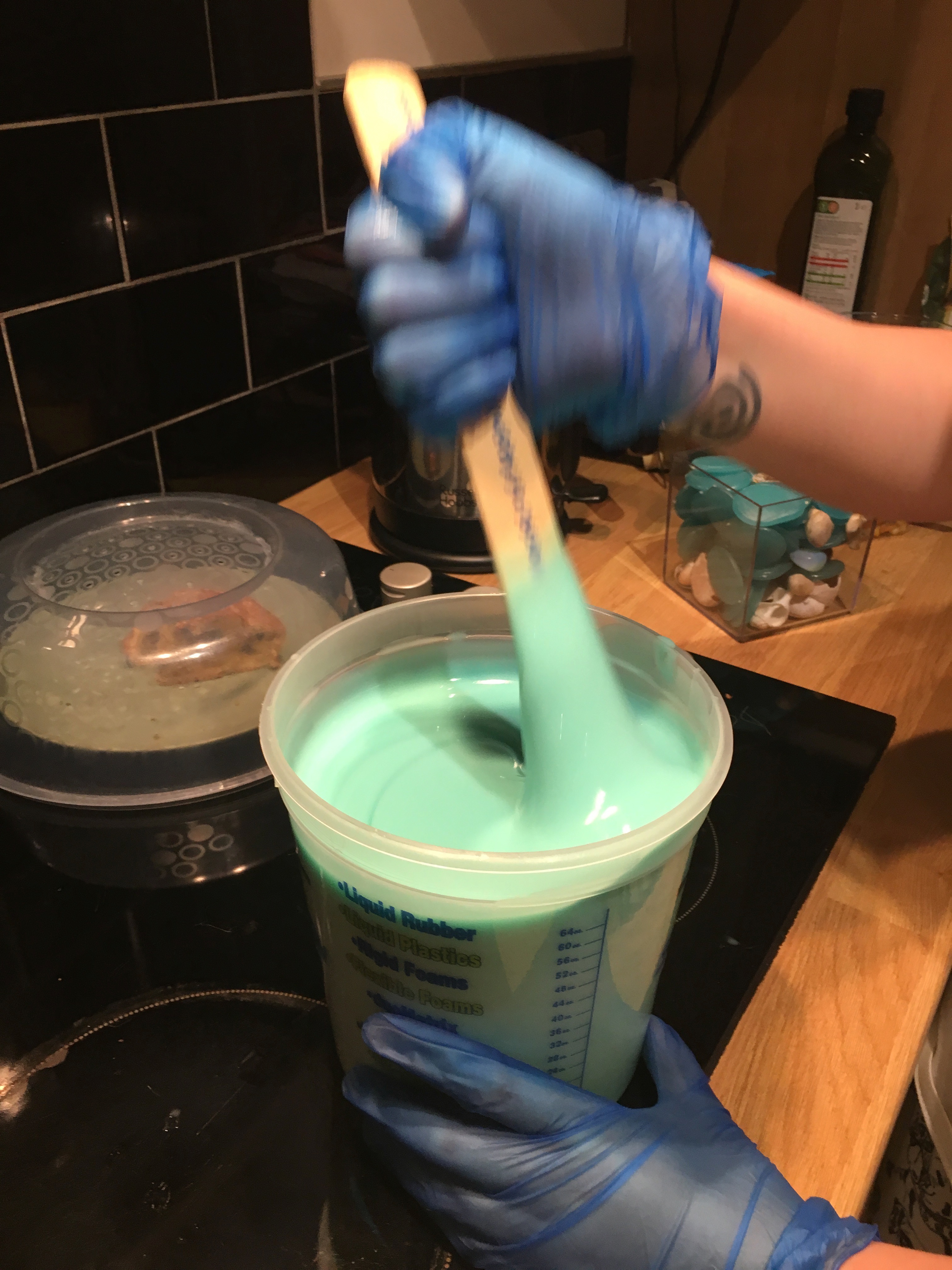
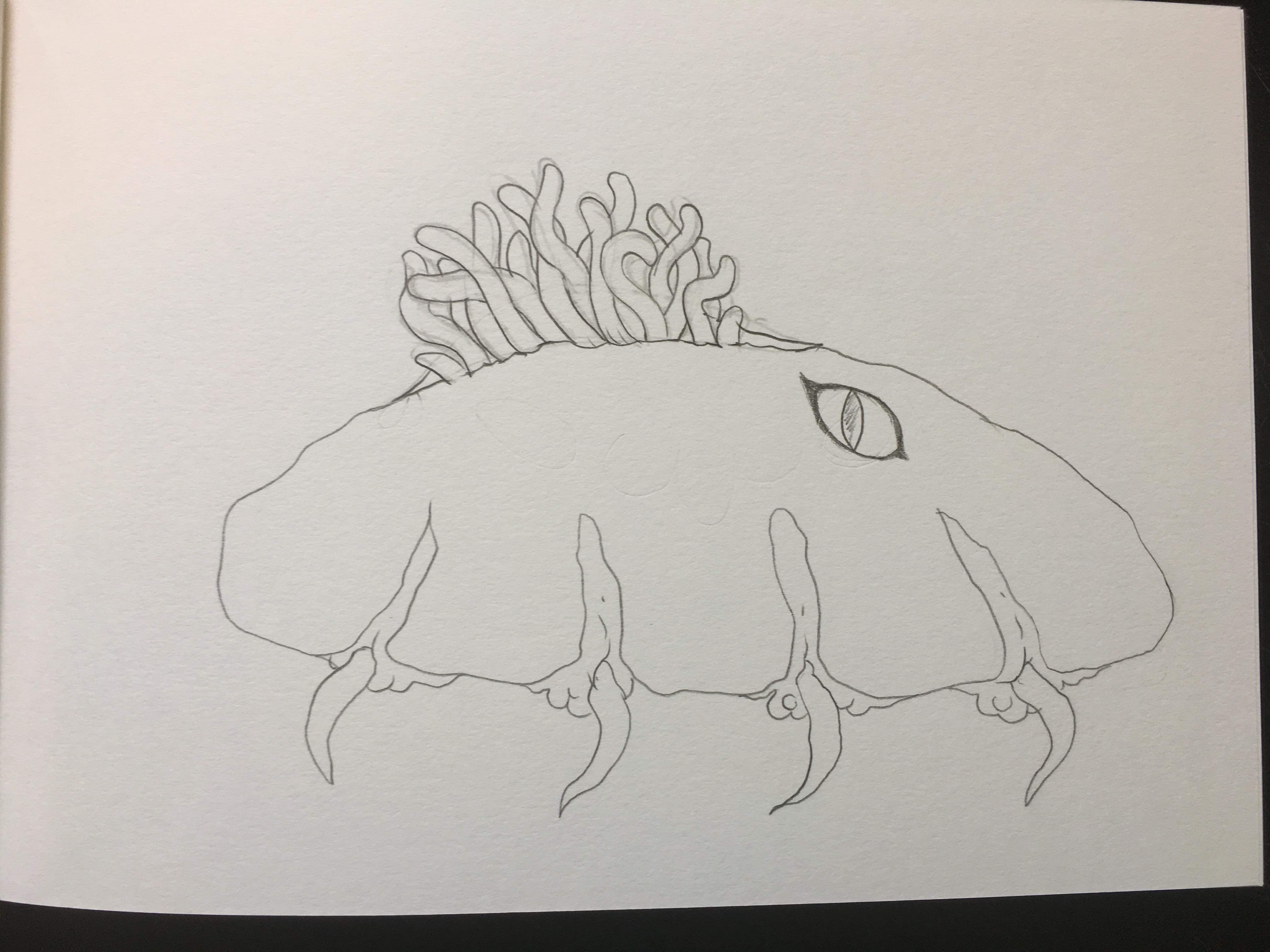
The body of the creatures was made by creating 3D models using clay, which was then submerged into a rubber mold for four hours. The mould is an equal two-part liquid that has to be mixed together. Once the mold was cured, the original model had to be removed and a release agent solution is poured in and left to dry. The empty space was filled with UV coloured silicone, which is again an equal two-part liquid but in this case colour has to be mixed in Part B first. This process had to be done about three different times for each creature until I got the most successful result in both durability and colour. The original sketches I drew inspiration from and the stories of the beings can be found here.
The soundscape, was produced using piano recordings placed through granular synthesis in Logic Pro. The sounds are broken into tiny grains which are then redistributed and reorganised to form other sounds. I wanted to create a feeling of being submerged underwater, as well as including some of the clicking sound effects which is how the Ketten creatures communicate.
Technical
Initially, I was planning to use motion or sound sensors that would trigger the behaviours of the creatures. Once I set up the space and thought more carefully when the creatures were ready, it felt more appropriate implementing a pre-set speed of air pressure. I landed on this decision because I didn’t want people to spend time playing with an invisible force that would affect what was happening, but rather allow them to observe and make their own judgements about what is before them. This way, I would also be giving more agency to the beings rather than those who have captivated them.
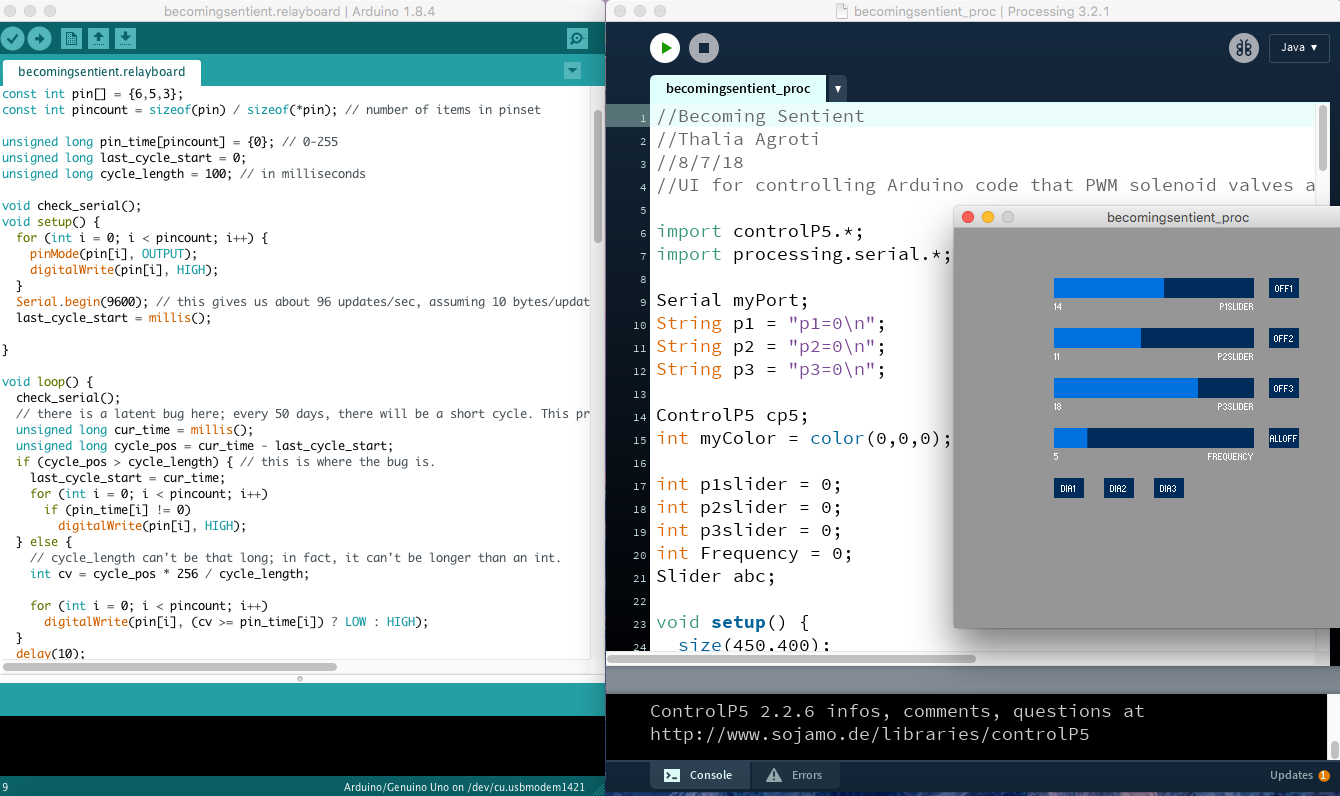
Inside the creatures, there is an opening where the tubing is secured. The bubbles come out with different intensities and this corresponds to the unique presence of each being’s character. Three of them are connected to a relay board which regulates each solenoid valve to allow for air flow that is pre-determined by a user interface programmed in Processing that then sends the signal to an Arduino. The neon-yellow creature, is attached to a pump powered by another Arduino which is triggering it to produce bubbles in a loop of intervals. The reasoning for this is that the specific being, is the only one that has the ability to be out of the water.
Future development
The whole process has been challenging one because originally, I had set out to create soft-robotic creatures that would inflate. While I had done extensive re-search on how this is achieved and created a few successful prototypes, it seemed near impossible to achieve the designs I had drawn and turn them into an object that also inflates. Traditionally, soft robotics are made by casting silicone in 3D printed cases that also includes the champers in which the air would be allowed to flow in. This way, once you successfully cast it, inflation is almost fully precise. However, you loose the option of having an outer texture because the exterior has to be flat. This is because any additional texture also means additional thickness, and so only wherever the silicon is thinest, those are the points that will successfully inflate.
I decided not to compromise on their appearance but this also meant making a sacrifice and loosing inflation. At its place, bubbles became the new mode of expression. It turned out to work well as I definitely felt the sense that they were hyperventilating, an emotion very much intended. However, I would of course like to overcome the issues I had with casting and hopefully find a way to keep the appearance as well as inflating them in various ways.
Lastly, while I very much enjoyed working with silicone, I would like to explore other ways in which I could have creatures underwater that would also encompass electronic components within them. A brilliant example that comes to mind, is the ArcheaBot developed by Anna Dimitriu and Alex May.
Self evaluation
In retrospect, I consider the overall outcome to be very close in terms of how I envisioned it. The mood of the space was for me fully accomplished, especially since I had used the same room last year but managed to utilise it better. The audio element was interestingly blending really well with the somewhat irritating sounds of the multiple pumps turning, but after getting used to them they became a part of the work and actually gave the piece extra edge.
Even though I had different goals in the beginning which either did not go through or I decided against them, I felt the whole process to be something very personal and because this is how it started in the first place, I am glad that I didn’t loose that along the way due to technical issues.
In the future, I would appreciate being able to combine this piece with more scientific research or collaborating with existing scientists as well as psychologists.
References
https://github.com/sojamo/controlp5
http://www.instructables.com/id/DIY-Soft-Robotic-Tentacle/
https://www.instructables.com/id/Control-of-a-DC-motor-with-Arduino-and-Visual-Basi/
0(rphan)d(rift>). 1995. Cyberpositive. Cabinet Gallery, London.
Ekman, U. 2017. Ubiquitous Computing, Complexity and Culture. Routledge, New York.
Grusin, R. 2015. The Nonhuman Turn. University of Minnesota Press, Minnesota.
Massumi, B. 1995. The Autonomy of Affect, Cultural Critique, No 31, The Politics and Environments, Part II. University of Minnesota, Minnesota.
N. Katherine Hayles. 2006. "Traumas of Code" Critical Inquiry 33, no. 1 (136-157). The University of Chicago Press Journals, Chicago.
Raqs Media Collective. 2017. The Contemporary Condition: We Are Here, But Is It Now? (The Submarine Horizons of Contemporaneity). Sternberg Press, Berlin.
Salter, C & Pickering, A. 2015. Alien Agency: Experimental Encounters with Art in the Making. MIT Press, Cambridge.
Shaviro, S. 2008. No Speed Limit: Three Essays on Accelerationism. University of Minnesota Press, Minnesota.
Yoldas, P. 2014. An Ecosystem of Excess, Ernst Schering Foundation's Publication Series. Argobooks, Berlin.